
Los codificadores de posición: Son aquellos que ofrecen directamente una señal digital a partir de una entrada analógica.
Codificadores incrementales
Un codificador incremental de rotación está formado por un disco con ranuras radiales ubicadas por lo general muy juntas en toda su circunferencia, o sino con líneas alternadas en color claro y oscuro, que giran frente a un fotosensor (o un conjunto de éstos, para más precisión), generando un pulso por cada ranura o cambio de color.

Un ejemplo típico de este tipo de codificadores se puede ver dentro de los mouses (ratones) de computadora: pequeños discos con ranuras en cada eje de movimiento. Un circuito lleva la cuenta de los pulsos, con lo que se puede conocer tanto el ángulo que se ha avanzado como la velocidad de giro (midiendo el tiempo entre pulsos). Estos codificadores son baratos pero no ofrecen una posición absoluta (como el potenciómetro), ya que el disco es igual en toda su circunferencia y no hay manera de saber dónde está ubicado (en qué ángulo absoluto) el eje. Habitualmente, se debe proveer al sistema de una manera de ubicarse en una posición cero, y de ahí en adelante contar pulsos hacia adelante o hacia atrás.
Codificadores absolutos
Los codificadores absolutos ópticos funcionan con un concepto similar al de los tipos incrementales, sólo que poseen un disco con un dibujo complejo, distribuido en anillos concéntricos que representan los bits de una palabra binaria. Deben tener un detector óptico por cada uno de estos anillos. Por ejemplo un disco con 8 anillos (como el de la figura), tendrá una resolución de 8 bits, o sea que podrá dividir su circunferencia en 256 porciones (más de 1 grado, si hablamos de ángulo). Un disco con más anillos concéntricos ofrecerá más bits de resolución y dará un dato de posición angular más preciso.

Por razones de precisión óptica, la codificación se suele hacer en una codificación llamada código Gray, que luego se traduce en el código binario estándar que utiliza una computadora para sus cuentas.
Construcción del codificador absoluto
El tipo absoluto produce un código digital único para cada ángulo distinto del eje.
Se corta un patrón complejo en una hoja de metal y se pone en un disco aislador, que está fijado al eje. También se coloca una fila de contactos deslizantes a lo largo del radio del disco. Mientras que el disco rota con el eje, algunos de los contactos tocan el metal, mientras que otros caen en los huecos donde se ha cortado el metal. La hoja de metal está conectada con una fuente de corriente eléctrica, y cada contacto está conectado con un sensor eléctrico separado. Se diseña el patrón de metal de tal forma que cada posición posible del eje cree un código binario único en el cual algunos de los contactos esté conectado con la fuente de corriente (es decir encendido) y otros no (apagados). Este código se puede leer por un dispositivo controlador, tal como un microprocesador, para determinar el ángulo del eje.
Sensores Autorresonantes
El principio de funcionamiento de los sensores autorresonantes se basa en un fenómeno físico resonante ofrecen una frecuencia de salida que depende de una magnitud de interés que afecta a la frecuencia de oscilación. Todos requieren un frecuencimetro—contador para medir bien la frecuencia o bien el periodo de oscilación- La elección de uno u otro método depende de la resolución deseada y del tiempo disponible para la medida. Las estructuras resonantes basadas en monocristales de silicio se prestan bien a la realización de circuitos integrados.En sensores se emplean tanto osciladores armónicos como de relajación. En los primeros hay una energía almacenada que cambia de una u otra forma de almacenamiento, por ejemplo de energía cinética en el movimiento de una masa a energía potencial en la tensión de un muelle. En los segundos hay una única forma de almacenamiento, y la energía almacenada se disipa periódicamente mediante algún mecanismo de puesta a cero.

Tipos de Sensores Autorresonantes
Sensores Resonadores de Cuarzo
Estos sensores están basados en una frecuencia de oscilación alta, se basan en la variación que sufre ésta ante una deformación del cristal, para un elemento con electrodos metálicos depositados en dos de sus caras, en la figura 4 se muestra el circuito eléctrico equivalente de un sensor de cuarzo resonante. En ésta, Lm viene determinada por la masa del cristal, Cm por la elasticidad mecánica, Rm por la fricción interna (que se traduce en una disipación de calor) y Co es la capacidad del soporte del cristal en paralelo con la de los electrodos metálicos, con el material piezoeléctrico como dieléctrico. La presencia de un circuito resonante permite emplear dicho elemento como base de un oscilador.

Termómetros Digitales de Cuarzo
Microbalanzas de cuarzo
Sensores de gas resonante
Sensores de fuerza y presión basados en resonadores de cuarzo
Caudalimetro de Vórtice
El principio del caudalimetro de vértice esta basado en la medición de la frecuencia de generación de vórtices por un obstáculo insertado en el flujo, cuya frecuencia es proporcional a la velocidad media, en un campo dado de número de Reynolds.
Aunque existan muchos dispositivos de este tipo, experiencia con este metodo de medida de caudal es limitada y este método solamente se puede utilizar con precaución. Por ejemplo, cualquier vibración de la conducción es capaz de alterar la frecuencia medida y por lo tanto debe ser evitada.
Sistema de acondicionamiento
Un circuito básico oscilador resonante serie, utiliza un cristal que está diseñado para oscilar en su frecuencia resonante serie natural. En éste circuito no hay capacitores en la realimentación Los circuitos resonantes serie son usados por la baja cantidad de componentes que se utilizan, pero estos circuitos pueden tener componentes parásitos que intervienen en la realimentación. y en el caso que el cristal deje de funcionar oscilarán a una frecuencia impredecible.
Un circuitos oscilador paralelo utiliza un cristal que está diseñado para operar con un valor específico de capacidad de carga. Esto resultará en un cristal que tendrá una frecuencia mayor que la frecuencia resonante serie, pero menor que la verdadera frecuencia resonante paralelo. Un circuito básico se muestra a continuación.

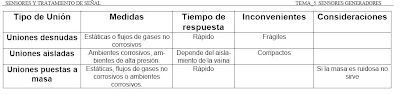
1. Otros métodos de detección.
a. Basado en uniones semiconductoras. Construcción y circuitos de acondicionamiento.




a. Basados en ultrasonidos. Construcción y circuito de acondicionamiento
El ultrasonido se define como ondas de sonido de alta frecuencia que están por encima del rango de percepción humana. El punto más bajo es generalmente 20kHz y el superior ya está en el rango del megahertz. Los seres humanos son capaces de detectar sonidos en el rango de 20Hz a 20kHz. Los instrumentos portátiles que miden la intensidad del ultrasonido transportado en el aire o por medio de una estructura cubren frecuencias desde 20 kHz hasta 100 kHz.
El método generalizado para detectar fugas es sencillo. Un inspector con un instrumento de ultrasonido escanea un área y busca un sonido diferente que se acelera. Con ajustes continuos del control de volumen se sigue el sonido de la fuga hasta que se escucha el punto más alto. En
el rango ultrasónico, el inspector es capaz de discriminar entre ruidos de fondo irrelevantes y la señal de la fuga. Alqunos instrumentos incluyen una sonda focalizadora de hule que estrecha el área de recepción. Estas sondas protegen contra ultrasonidos competitivos y ayudan a localizar la ubicación de fugas pequeñas. La gran ventaja de la detección por ultrasonido es que puede usarse en diferentes ambientes, pues es sensible al sonido y no específica para cada gas. Cuando ocurre una fuga, el fluido (líquido o gas) se mueve desde el lado de alta presión a través del agujero al lado de baja presión de la fuga, donde se expande rápidamente y produce un flujo turbulento. Esta turbulencia tiene fuertes componentes ultrasónicos que son detectados por el instrumento. La intensidad de la señal de ultrasonido cae rápidamente desde la fuente, lo cual permite localizar exactamente el sitio de la fuga.
Para sistemas fuera de servicio, una prueba especializada, denominada una prueba de tono, emplea un transmisor ultrasónico para producir una fuente de sonidos ultrasónicos. La prueba se lleva a cabo colocando un transmisor adentro, o en un lado de la pieza del equipo a inspeccionar. Una señal vibratoria viaja por toda la pieza y penetra cualquier sitio de fuga existente. Un escaneado para penetración sónica usa un instrumento de ultrasonido y localiza la fuga. Esta prueba es especialmente apta para intercambiadores de calor.
b. Basado en fibras ópticas. Construcción y circuito de acondicionamiento.
Los sensores de Fibra Optica están formados por un amplificador que contiene el del emisor y el receptor, y un cable de fibra óptica que transmite y recibe la luz reflejada por el objeto a detectar.
Las características y presentaciones dependen mucho del fabricante. Así como en las Fotocélulas, la evolución tecnológica no se ha hecho muy patente, en los sensores de Fibra Optica se ha notado una evolución en los últimos años muy importante.
Un filamento de vidrio sumamente delgado y flexible (de 2 a 125 micrones) capaz de conducir rayo ópticos (señales en base a la transmisión de luz). Las fibras ópticas poseen capacidades de transmisión enormes, del orden de miles de millones de bits por segundo. Se utilizan varias clases de vidrios y plásticos para su construcción.
Una fibra es un conductor óptico de forma cilíndrica que consta del núcleo (core), un recubrimiento (clading) que tienen propiedades ópticas diferentes de las del núcleo y la cubierta exterior (jacket) que absorbe los rayos ópticos y sirve para proteger al conductor del medio ambiente así como darle resistencia mecánica. Además, y a diferencia de los pulsos electrónicos, los impulsos luminosos no son afectados por interferencias causadas por la radiación aleatoria del ambiente.
Cuando las compañías telefónicas reemplacen finalmente los cables de cobre de sus estaciones centrales e instalaciones domiciliarias con fibras ópticas, estarán disponibles de modo interactivo una amplia variedad de servicios de información para el consumidor, incluyendo la T.V. de alta definición.
Cada una de las fibras ópticas, puede transportar miles de conversaciones simultáneas de voz digitalizada.
Los sensores de Fibra Optica están formados por un amplificador que contiene el del emisor y el receptor, y un cable de fibra óptica que transmite y recibe la luz reflejada por el objeto a detectar.
Las características y presentaciones dependen mucho del fabricante. Así como en las Fotocélulas, la evolución tecnológica no se ha hecho muy patente, en los sensores de Fibra Optica se ha notado una evolución en los últimos años muy importante.
Ventajas De La Fibra Óptica
Capacidad de transmisión: La idea de que la velocidad de transmisión depende principalmente del medio utilizado, se conservo hasta el advenimiento de las fibras ópticas, ya que ellas pueden transmitir a velocidades mucho más altas de lo que los emisores y transmisores actuales lo permiten, por lo tanto, son estos dos elementos los que limitan la velocidad de transmisión.
Mayor capacidad debido al ancho de banda mayor disponible en frecuencias ópticas.
Inmunidad a transmisiones cruzadas entre cables, causadas por inducción magnética.
Inmunidad a interferencia estática debida a las fuentes de ruido.
Resistencia a extremos ambientales. Son menos afectadas por líquidos corrosivos, gases y variaciones de temperatura.
La seguridad en cuanto a instalación y mantenimiento. Las fibras de vidrio y los plásticos no son conductores de electricidad, se pueden usar cerca de líquidos y gases volátiles.
Parámetros De Una Fibra Óptica
Existen varios parámetros que caracterizan a una fibra óptica. Se habla de parámetros estructurales y de transmisión establecen las condiciones en las que se pueden realizar la transmisión de información.
Entre los parámetros estructurales se encuentra:
*El perfil de índice de refracción.
*El diámetro del núcleo.
*La apertura numérica.
*Longitud de onda de corte.
En cuanto a los parámetros de transmisión se tiene:
*Atenuación.
*Ancho de banda.



































 Oscilador: La amplitud de oscilación varía al acercarse un objeto.
Oscilador: La amplitud de oscilación varía al acercarse un objeto.





































{kind=link}