En los sensores generadores o pasivos, en cambio, la energía de salida es suministrada por la entrada. Los sensores moduladores requieren en general más hilos que los generadores, ya que la energía de alimentación suele suministrarse mediante hilos distintos a los empleados para la señal. Además, esta presencia de energía auxiliar puede crear un peligro de explosiones en algunos ambientes. Por contra, su sensibilidad se puede modificar a través de la señal de alimentación, lo que no permiten los sensores generadores. (Obs: La designación de activos y pasivos se emplea en algunos textos con significados opuesto al que se ha dado, por lo que aquí no hacemos uso de ella para evitar confusiones). Según la señal de salida, los sensores se clasifican en analógicos o digitales. En los analógicos la salida varia, a nivel macroscópico, de forma continua. La información está en la amplitud, si bien se suelen incluir en este grupo los sensores con salida en el dominio temporal. Si es en forma de frecuencia, se denominan, a veces, "casi digitales", por la facilidad con que se puede convertir en una salida digital. En los sensores digitales, la salida varia en forma de saltos o pasos discretos. No requieren conversión A/D y la transmisión de su salida es más fácil. Tienen también mayor fidelidad y mayor fiabilidad, y muchas veces mayor exactitud, pero lamentablemente no hay modelos digitales para muchas de las magnitudes físicas de mayor interés.
Atendiendo al modo de funcionamiento, los sensores pueden ser de deflexión o de comparación. En los sensores que funcionan por deflexión, la magnitud medida produce algún efecto físico, que engendra algún efecto similar, pero opuesto, en alguna parte del instrumento, y que esta relacionado con alguna parte útil. Un dinamómetro para la medida de fuerzas es un sensor de este tipo en el que la fuerza aplicada deforma un muelle hasta que la fuerza de recuperación de éste, proporcional a su longitud, iguala la fuerza aplicada. En los sensores que funcionan por comparación, se intenta mantener nula la deflexión mediante la aplicación de un efecto bien conocido, opuesto al generado por la magnitud a medir. Hay un detector del desequilibrio y un medio para restablecerlo. En una balanza manual, por ejemplo, la colocación de una masa en un platillo provoca un desequilibrio, indicado por una aguja sobre una escala. El operario coloca entonces una o varias masas en el otro platillo hasta alcanzar el equilibrio, que se juzga por la posición de la aguja. Las medidas por comparación suelen ser más exactas porque el efecto conocido opuesto se puede calibrar con un patrón o magnitud de referencia de calidad. El detector de desequilibrio sólo mide alrededor de cero y, por lo tanto, puede ser muy sensible y no necesita estar calibrado. Por contra, tienen en principio menor respuesta dinámica y, si bien se pueden automatizar mediante un servomecanismo, no se logra normalmente una respuesta tan rápida como en los de deflexión.
Según el tipo de relación entrada-salida, los sensores pueden ser de orden cero, de primer orden, de segundo orden o de orden superior. El orden está relacionado con el número de elementos almacenadores de energía independientes que incluye el sensor, y repercute en su exactitud y velocidad de respuesta. Este clasificación es de gran importancia cuando el sensor forma parte de un sistema de control en lazo cerrado. Cualquiera de estas clasificaciones es exhaustiva, y cada una tiene interés particular para diferentes situaciones de medida. Ahora bien, para el estudio de un gran número de sensores se suele acudir a su clasificación de acuerdo con la magnitud medida. Se habla, en consecuencia, de sensores de temperatura, presión, caudal, humedad, posición, velocidad, aceleración, fuerza, par, etc.
Sin embargo, esta clasificación difícilmente puede ser exhaustiva ya que la cantidad de magnitudes que se pueden medir es prácticamente inagotable. Ejemplo en la cantidad de contaminantes químicos en el aire o en el agua, o en la cantidad de proteínas diferentes que hay en el cuerpo humano y que interesa detectar. Desde el punto de vista de la ingeniería electrónica, es más atractiva la clasificación de los sensores de acuerdo con el parámetro variable: resistencia, capacidad, inductancia, añadiendo luego los sensores generadores de tensión, carga o corriente, y otros tipos no incluidos en los anteriores grupos.
En un circuito de dos metales distintos y homogéneos, A y B, con dos uniones a diferentes temperatura, aparece una corriente eléctrica (Fig 6.1). Es decir hay una conversión de energía térmica a energía eléctrica. Si el circuito está abierto aparece una fuerza termoelectromotriz que depende de los dos metales y de las temperaturas entre las uniones.

Consiste en el calentamiento o enfriamiento de la unión de dos metales distintos al pasar una corriente por ellos (Fig 6.2). Al invertir el sentido de la corriente se invierte también el sentido del flujo de calor.
 Efecto Thompson (William Thompson 1847).
Efecto Thompson (William Thompson 1847).Consiste en la absorción o liberación de calor por parte de un conductor homogéneo con temperatura no homogénea por el que circula una corriente (Fig 6.3). El calor liberado es proporcional a la corriente y cambia de signo con ella.

Tipos de termopares.
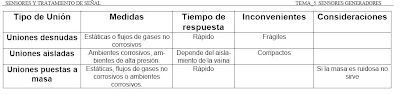
Consideraciones en las uniones de un termopar:
respuesta lenta.
Ø Coeficiente de temperatura débil en la resistividad.
Ø Resistencia a la oxidación a altas temperaturas.
Ø Linealidad de la respuesta.
Ø Estas propiedades se obtienen mediante las aleaciones que muestra la tabla 6.1.


Aplicaciones.


Normas de aplicación práctica para termopares.
· Ley de circuitos homogéneos
En un circuito de un único metal homogéneo, no se puede mantener una corriente termoeléctrica mediante la aplicación exclusiva de calor aunque varíe la sección transversal del conductor.

Ley de los metales intermedios
La suma algebraica de las f.t.e.m en un circuito compuesto de un número cualquiera de metales
distintos es cero si todo el circuito está a una temperatura uniforme. Esto significa que se puede intercalar un instrumento de medida sin añadir errores, siempre y cuando las nuevas uniones estén a la misma temperatura. (Fig 6.7)

Ley de las temperaturas intermedias
Si dos metales distintos producen una f.t.e.m. E1 cuando las uniones están a T1 y T2, y una f.t.e.m E2 cuando las uniones están a T2 y T3, la f.t.e.m cuando las uniones estén a T1 y T3 será E1+E2 (Fig 6.9).

Compensación de la unión de referencia.
Ø Para aplicar el efecto Seebeck a la medida de temperaturas es necesario mantener una de las
uniones a una temperatura de referencia. (Fig 6.11)
Ø Solución de gran exactitud y fiabilidad, pero de alto coste y difícil mantenimiento.
Ø Una solución que permite usar un hilo más económico se muestra en la Fig 6.12.
Ø Si el margen de variación de la Tª ambiente es menor que la resolución deseada, puede dejarse la unión al aire.
Ø Compensación electrónica de la unión de referencia.
- Consiste en detectar las variaciones de la unión de referencia con otro sensor colocado
en la vecindad de la unión de referencia y se suma una la tensión igual a la generada
en la unión fria. (Fig 6.13) La tensión de alimentación del puente debe ser estable.




No hay comentarios:
Publicar un comentario